Робот водолаз изследва потънал кораб от XVII век (ВИДЕО)

Последно: 19 юни 2024 г. в 10:26
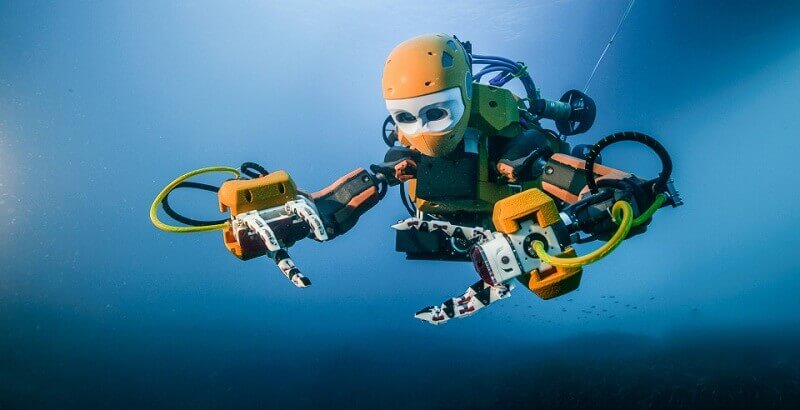
Станфордският университет представи пред обществеността нов робот водолаз с изкуствен интелект. Разработката, получила названието OceanOne, вече е извършила „работно“ гмуркане и е успяла да открие първото си съкровище.
OceanOne наистина изглежда като водолаз: „ръстът“ на робота е метър и половина, а неговата глава е снабдена със стереоскопична камера, която позволява на изследователите да управляват робота и да виждат всичко, което вижда той.
Шарнирните ръце на робота са снабдени с датчици за сила, които притежават тактилна обратна връзка – операторът ги управлява с джойстик и веднага може да определи дали роботът държи в ръцете си нещо твърдо и тежко, или по-леко и крехко.
Вместо „крака“ в долната част на роботизирания водолаз се намират осем двигателя с малка тяга, а също и акумулатори за захранване на устройството и компютрите. С тяхна помощ изкуственият интелект избира необходимото ниво на натиск за задържане на предметите, за да не ги повреди, става ясно от съобщение на сайта на Станфордския университет.
Frederic Osada and Teddy Seguin/DRASSM
„OceanOne представлява управляем аватар. Целта е виртуален дайвинг, който премахва опасността за човека – разказва професорът по информатика от Станфордския университет Усама Хатиб (Oussama Khatib). – Неверояно беше да получим машина с човешки характеристики, работеща на дълбочина като човек водолаз.“
За да демонстрират прототипа на човекоподобния робот в действие, екип от студенти и аспиранти на Хатиб, както и професорът по машиностроене Марк Куткоски (Mark Cutkosky) отлетели за Франция и работили съвместно с директора на подводните археологични изследвания на Министерството на културата на Франция Мешел Л’Аур (Michel L’Hour).
По-рано екипът от дълбоководни археолози провели дистанционно изследване на 20 мили от южния бряг на Франция, където през 1664 година потънал флагманският кораб на крал Луи XIV с названието La Lune. Това корабокрушение може да пази недокоснати многобройни съкровища и артефакти.
Изследователите чакали в лодка на повърхността на океана, докато подводният апарат бил управляван от Винсент Крез (Vincent Creuze), изследовател от университета на Монпелие.
Данните за корабокрушението били качени в OceanOne. Когато се гмурнал, той автономно доплувал към кораба. Хатиб за всеки случай държал джойстика в ръце, но основно роботът се справял самостоятелно и избягвал сблъсъци с препятствия, тъй като бордовите му датчици измерват скоростта и посоката на течението и турбулентността.
Когато Хатиб забелязал на видеото ваза с размер на грейпфрут, той взел управлението на робота в собствените си ръце – дал команда на робота да застане над вазата, да я докосне с ръце, да анализира нейните очертания и тегло, а след това да постави един пръст във вътрешността за по-добро захващане. Когато роботът хванал вазата, Хатиб му дал команда да плува към кошницата и внимателно да я постави вътре, като плътно затвори капака, след което кошницата била предадена на водолазите за изкачване на повърхността.

Frederic Osada and Teddy Seguin/DRASSM
„Вие можете да почувствате точно какво прави роботът, сякаш сте там. Усещането за докосване създава ново ниво на възприятие – коментира Хатиб. – Ние обединяваме човек и робот интуитивно и осмислено. Човек може да даде на робота интуиция, опит и когнитивни способности. Заедно те образуват невероятно съчетание. Човек и робот са способни да работят в опасни за човека условия без риск за живота и здравето.“
OceanOne ще се върне в Станфорд този месец и екипът на Хатиб ще продължи работата над проекта. Сега главната цел е да се създаде робот водолаз, който ще замени хората в опасни и сложни изследвания – подобни устройства още в близко време ще могат да бъдат задействани за изследвания на японския бряг в района на АЕЦ „Фукушима 1“, а също при изучаване на коралови рифове на големи дълбочини, в археологически изследвания и при мониторинг на местата на стихийни бедствия и корабокрушения.